
搜索结果: 1-7 共查到“控制科学与技术 Delta”相关记录7条 . 查询时间(0.069 秒)
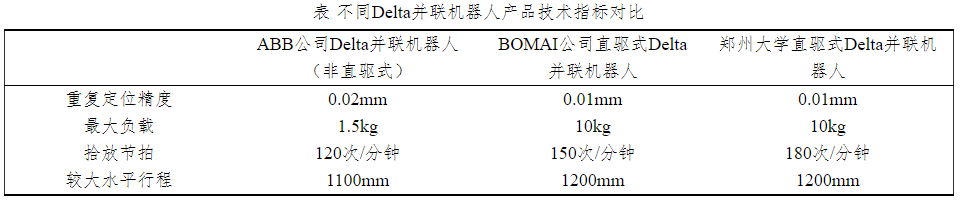
近日,河南省特聘教授司纪凯带领郑州大学电气与信息工程学院“先进电磁驱动与控制研究团队”,在郑州市协同创新重大专项“机器人驱动智能化包装生产线及搬运码垛系统研发”资助下,自主研发了系列化新型直驱式Delta并联机器人,在其直驱技术方面取得重大突破。
Delta 算子不确定系统的滑模变结构控制
delta 算子 变结构控制 趋近律 线性矩阵不等式
2012/2/27
研究算子系统滑模变结构控制的综合问题. 首先, 利用线性矩阵不等式方法给出了切换面存在的充分条件, 分析了δ 算子变结构控制系统的到达条件, 将连续系统和离散系统统一到算子系统. 基于指数趋近律, 给出滑模变结构控制一般方法. 其次, 给出一类δ 算子不确定系统的滑模控制器设计, 分析了准滑动模态的渐近稳定性, 使得系统具有良好的动态性能. 最后, 用一个仿真实例说明在采样周期取值非常小的前提下,...
高精度音频多位sigma-delta调制器设计
sigma-delta调制器 开关电容积分器 高精度 多位
2011/1/20
设计一个内部采用4位量化器的二阶单环多位sigma-delta调制器。为解决反馈回路中多位DAC元件失配导致的信号谐波失真问题,该sigma-delta调制器采用CLA(Clocked averaging algorithm)技术提高多位DAC的线性度,同时采用动态频率补偿技术增加积分器的稳定性。调制器信号频率带宽为24 kHz,过采样率(OSR)为128,采用尺寸为0.5 µm的CM...
改进Delta并联机构运动可靠性分析
运动可靠性 并联机器人 改进Delta机构
2009/3/9
运动精度是评价机构质量的重要考核指标。以往并联机构运动精度分析中,往往不考虑输入误差的随机性,造成评价结果不准确。首先应用齐次坐标变换,推导了改进Delta并联机构的位置反解公式。基于位置反解和一阶泰勒展开,建立了包含机构尺寸误差、转动副间隙误差和驱动误差的机构位置误差计算模型。利用该误差模型,考虑各个原始输入误差的随机性,推导了机构运动可靠性数学模型,给出了评价机构运动可靠性高低的量度和计算方法...
系统的状态估计在航迹互联,机动目标跟踪过程中有着重要的作用.本文研究了一类方差约束的不确定Delta算子系统的鲁棒滤波器的设计问题,通过求解修正的Riccati方程得到了不依赖于不确定性的鲁棒滤波器,使得对所容许的不确定性参数,系统的每个状态的估计方差不大于预先给定值;并讨论了期望的滤波器存在的条件.最后给出一个例子来验证所给方法的有效性.
Abstract本文提出了Delta算子描述的线性系统的输入) 输出能量解耦方法.它使得任何一个输入能量主要控制对应的一个输出的能量,对其它输出能量的影响尽可能小.所得结论将连续与离散系统的有关结果统一于Delta算子系统.
一类Delta算子不确定时滞系统保性能滤波
保性能滤波
线性矩阵不等式
凸多面体不确定性
Delta算子时滞系统
2007/8/27
Abstract针对一类具有凸多面体参数不确定性的Delta算子时滞系统,研究其保性能滤波问题.采用线性矩阵不等式(LMI)方法,给出了滤波器存在的充分条件和显式表达式.给出的滤波器满足滤波误差动态渐近稳定和保性能方程最小.所提出的方法可将连续系统和离散系统统一到Delta算子框架下.仿真例子证明了该方法的可行性.